First Crash

Testing
The mechatronics part is not ready, but I should wait no more. If I test it only when everything is ready, then I will never test it.
The first 3 tests are in glider mode and 1 last test is in the flapping mode without the active pitch of the lower arms.
First, all 4 flights have an unstable pitch angle, suggesting that the static margin (SM) is too small. Our SM is estimated to be 0.02, which is a good value for a well-controlled modern airplane but way too small for a free-response ornithopter. We need a larger tail to increase the static margin to around 0.10.
Second, all 4 flights have a non-repeatable launch. With bare hands, I am not able to launch the ornithopter with a precise angle of attack without unwanted roll or yaw moment. As a result, the flight becomes unpredictable from the very beginning. To ensure a known initial condition, I either should train myself or my teammate to become a better human launcher or should build a mechanical launcher.
Repairment
During those crashes, all wing skin detaches from ribs and two leading/trailing edge veneers broke into pieces. In order to detect internal failure, I disassembled the whole carbon-fiber assembly. Thank gods, no failure in any carbon fiber piece is detected. Thanks to JSK-koubou’s idea of assembly platform, assembling and dissembling are no longer that painful.

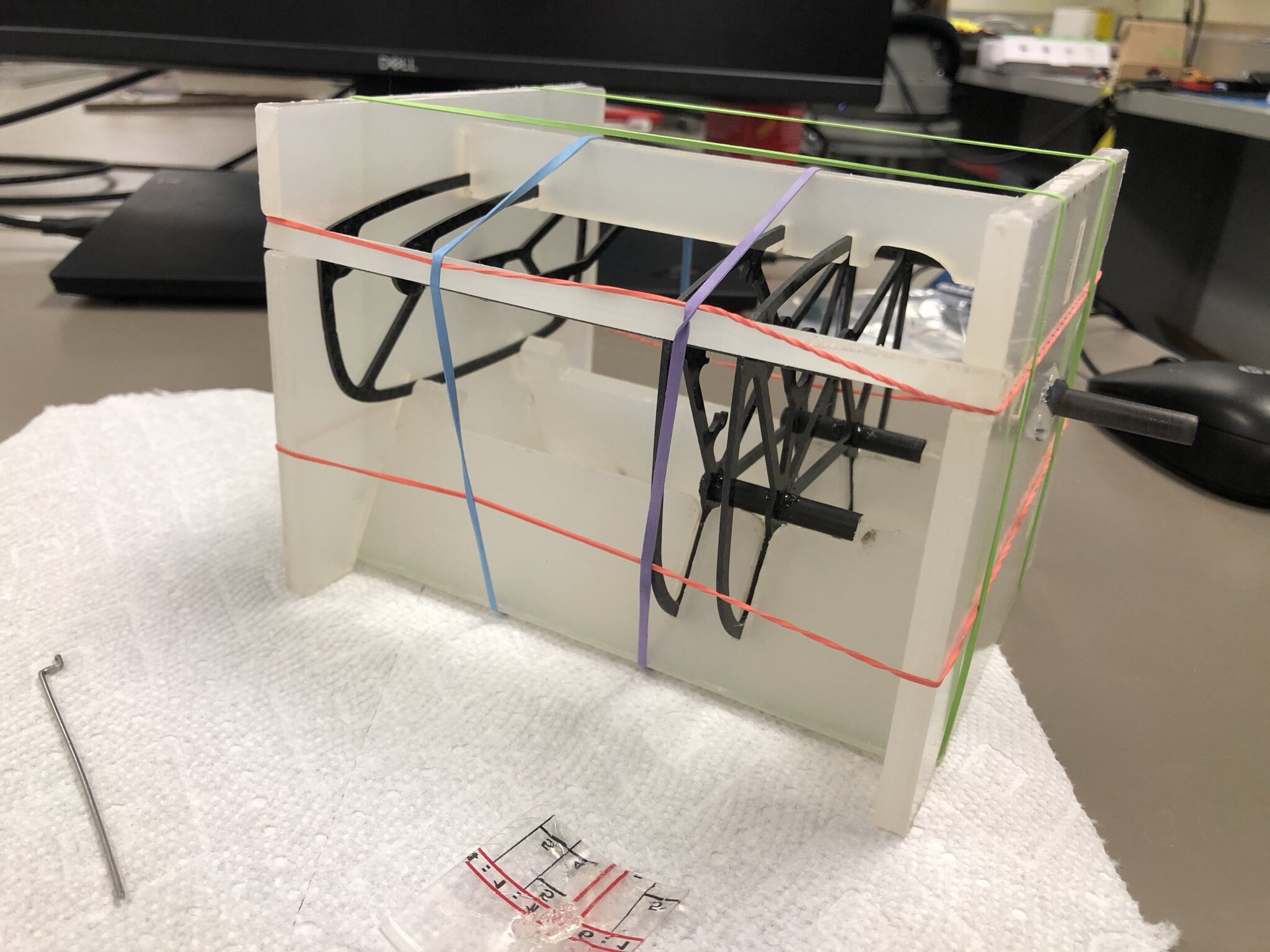
Assembly platform for wing
Assembly platform for fuselage
Matthew had greatly improved our technics for veneer forming and skin attachment. Sadly, it still takes him 20 painful hours to replace broken veneers and detached skin. Thanks to Matthew’s help, I can spend my time solving other problems.

Citation:
JSK-koubou, Bird drone production record, https://jisaku-koubou.com/archives/category/%e9%b3%a5%e5%9e%8b%e3%83%89%e3%83%ad%e3%83%bc%e3%83%b3%e4%bd%9c%e8%a3%bd%e8%a8%98%e9%8c%b2